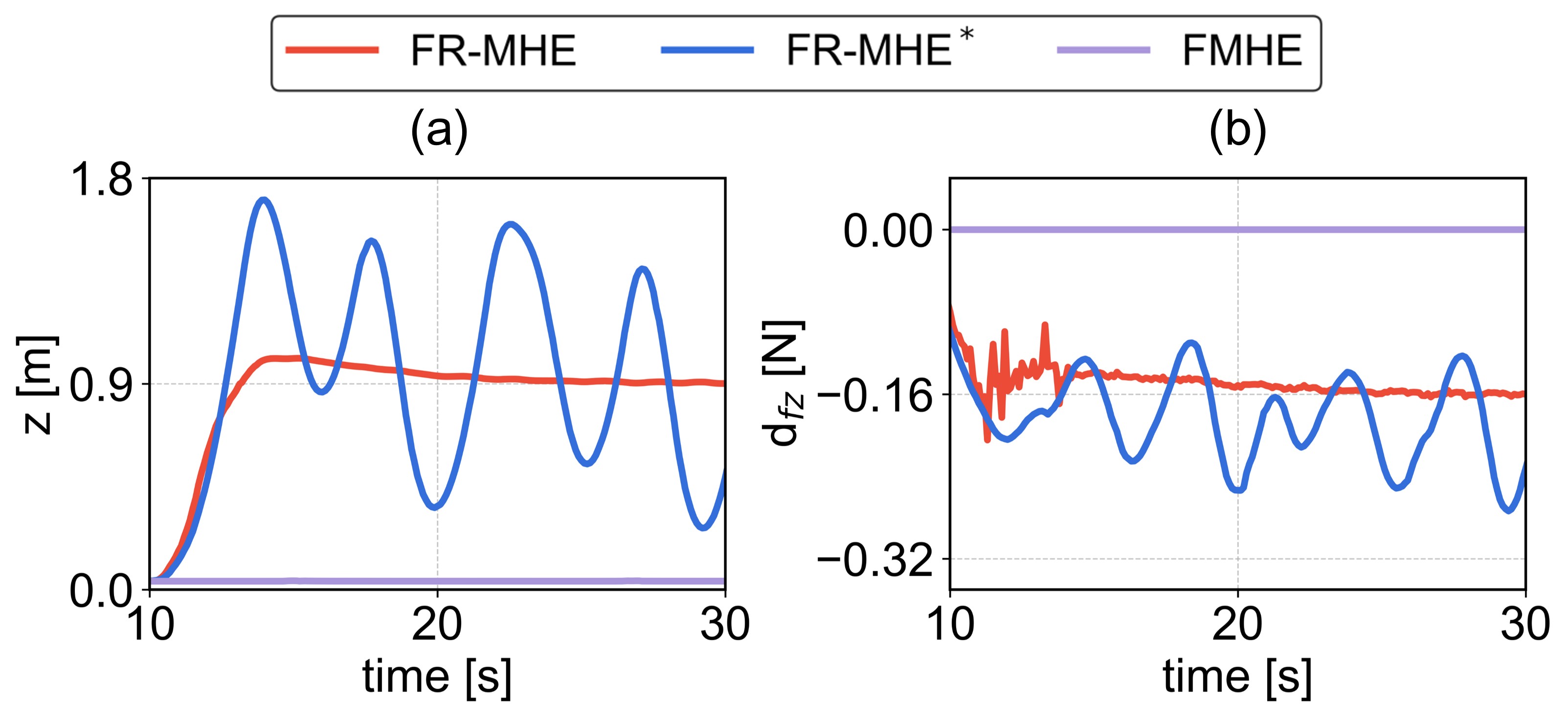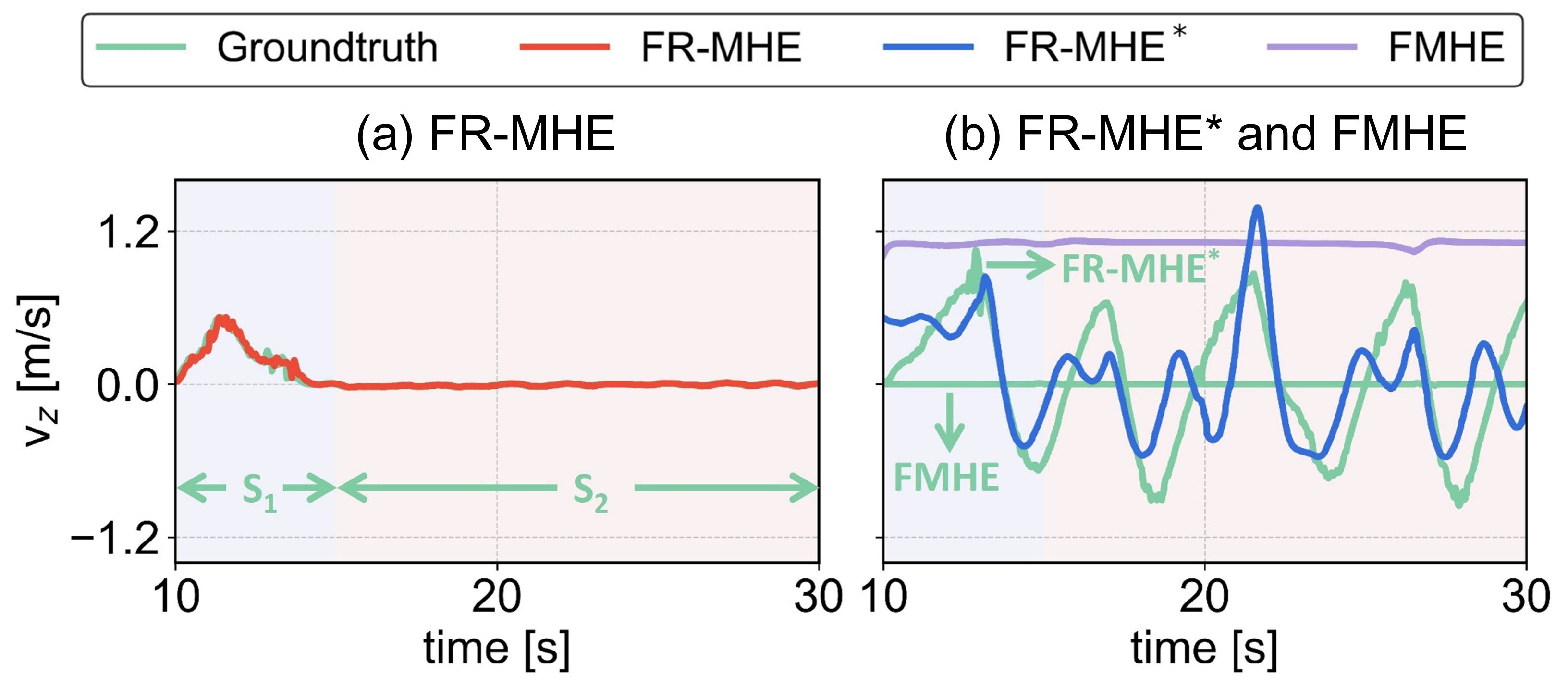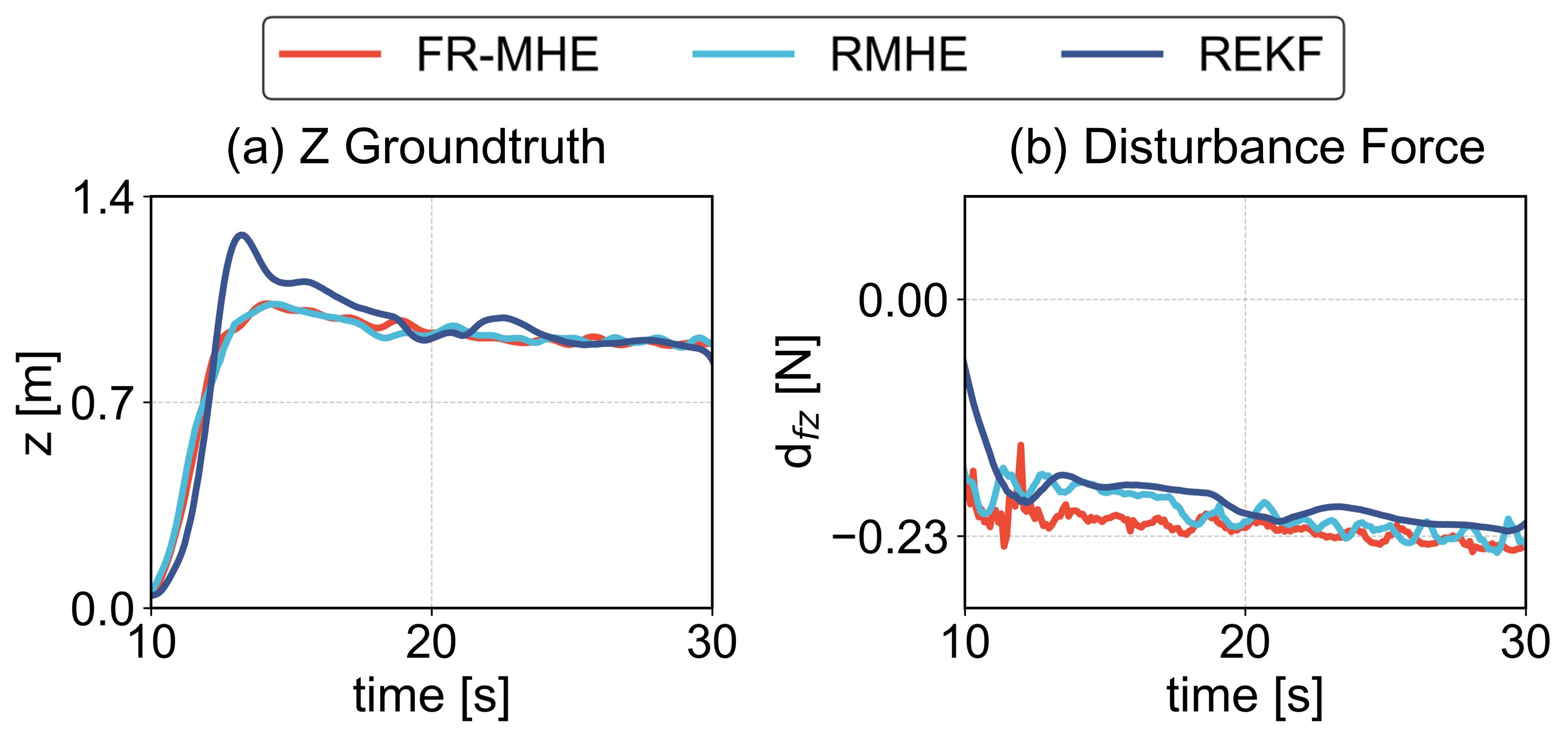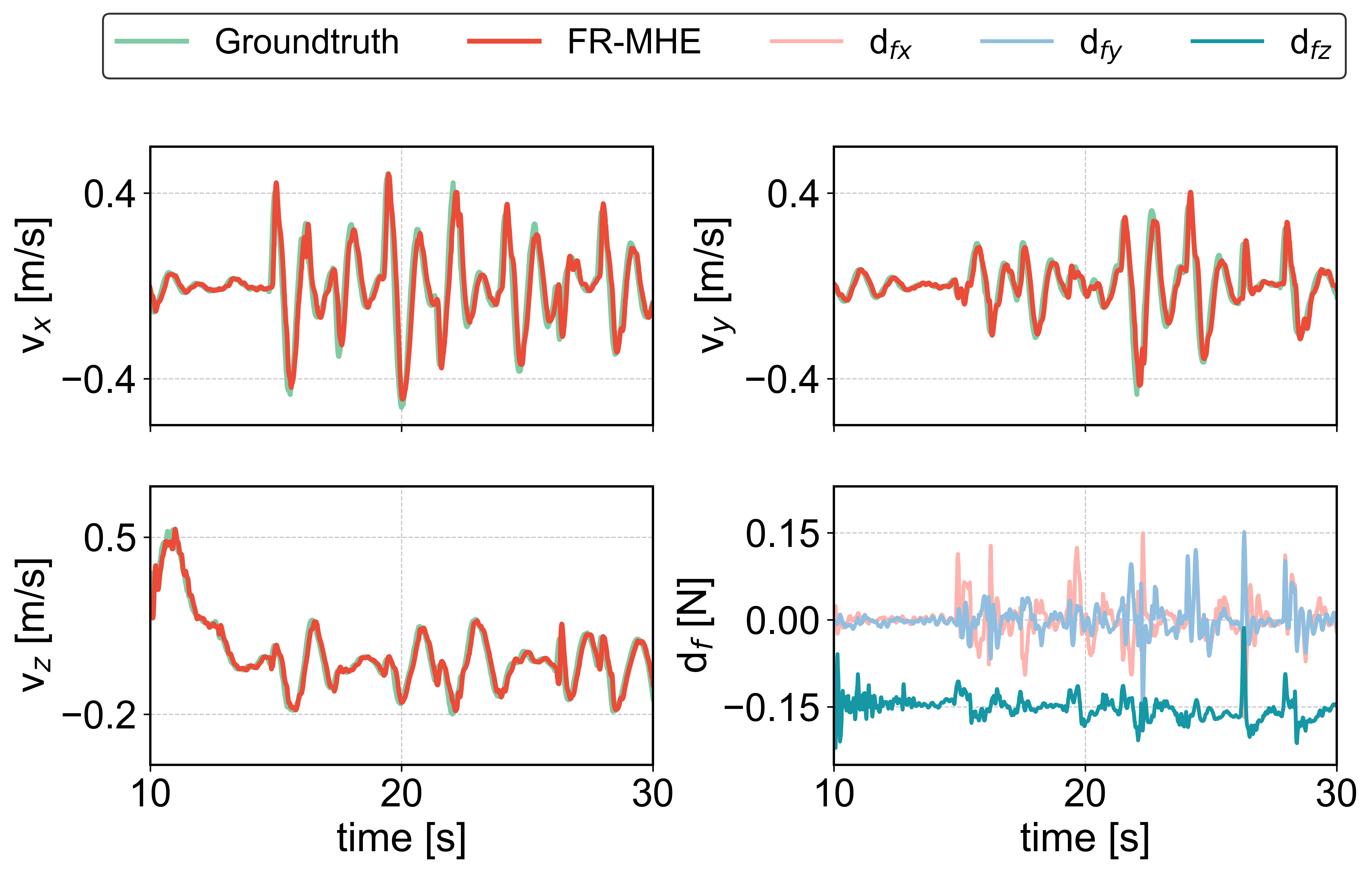
(1) Disturbance Resilience: We introduce an explicit disturbance augmentation meachanism, enabling the proposed FR-MHE framework to more effectively capture various disturbances and maintain accurate state estimates under real-world uncertainties.
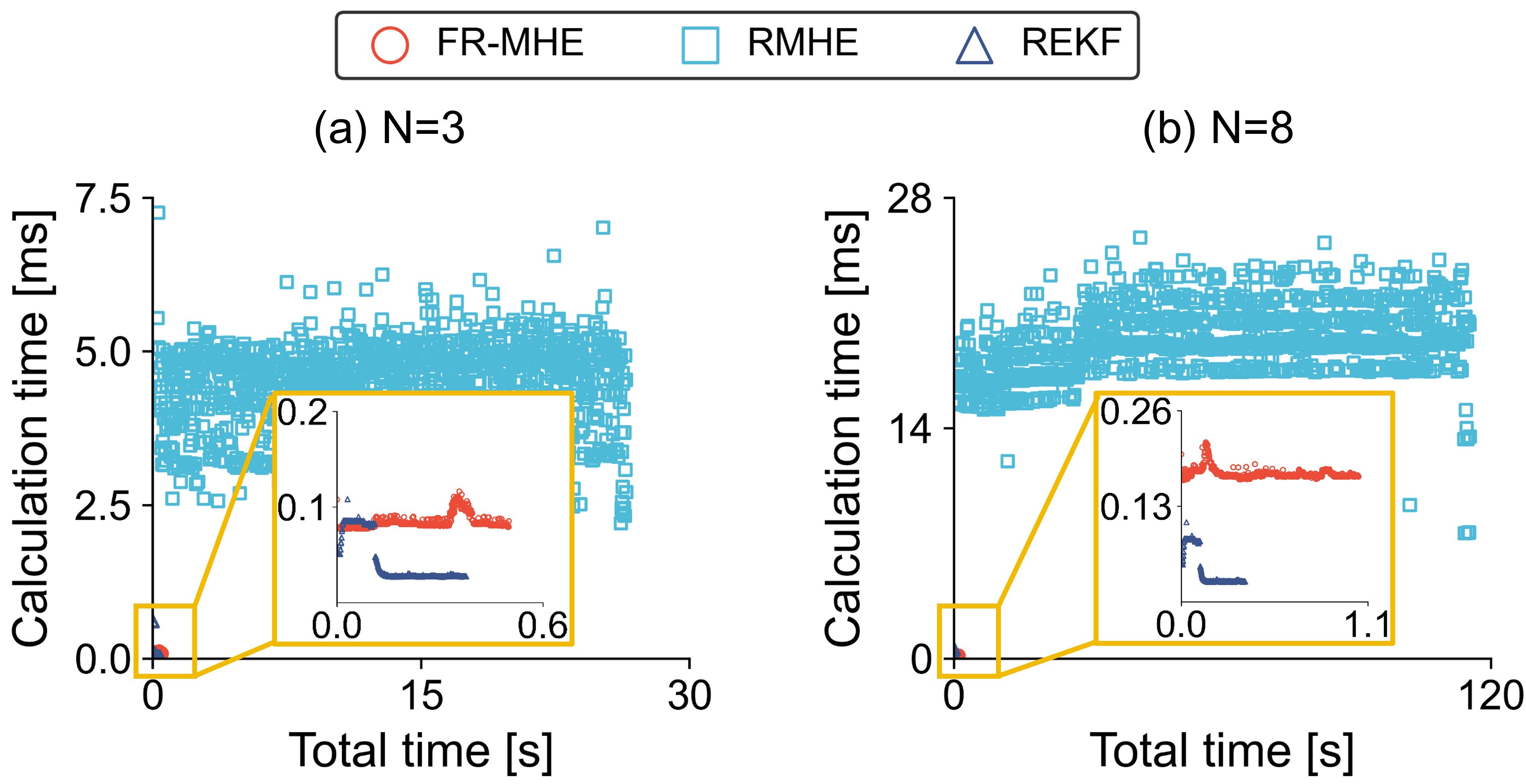
(2) Computation Efficiency: We adopt a single-iteration gradient descent in FR-MHE to reduce computation burden of MHE. The computational time complexity is only $\mathcal{O}(N \cdot n^3)$, and improves computation efficiency by 55-126x (i.e., to sub-millisecond).
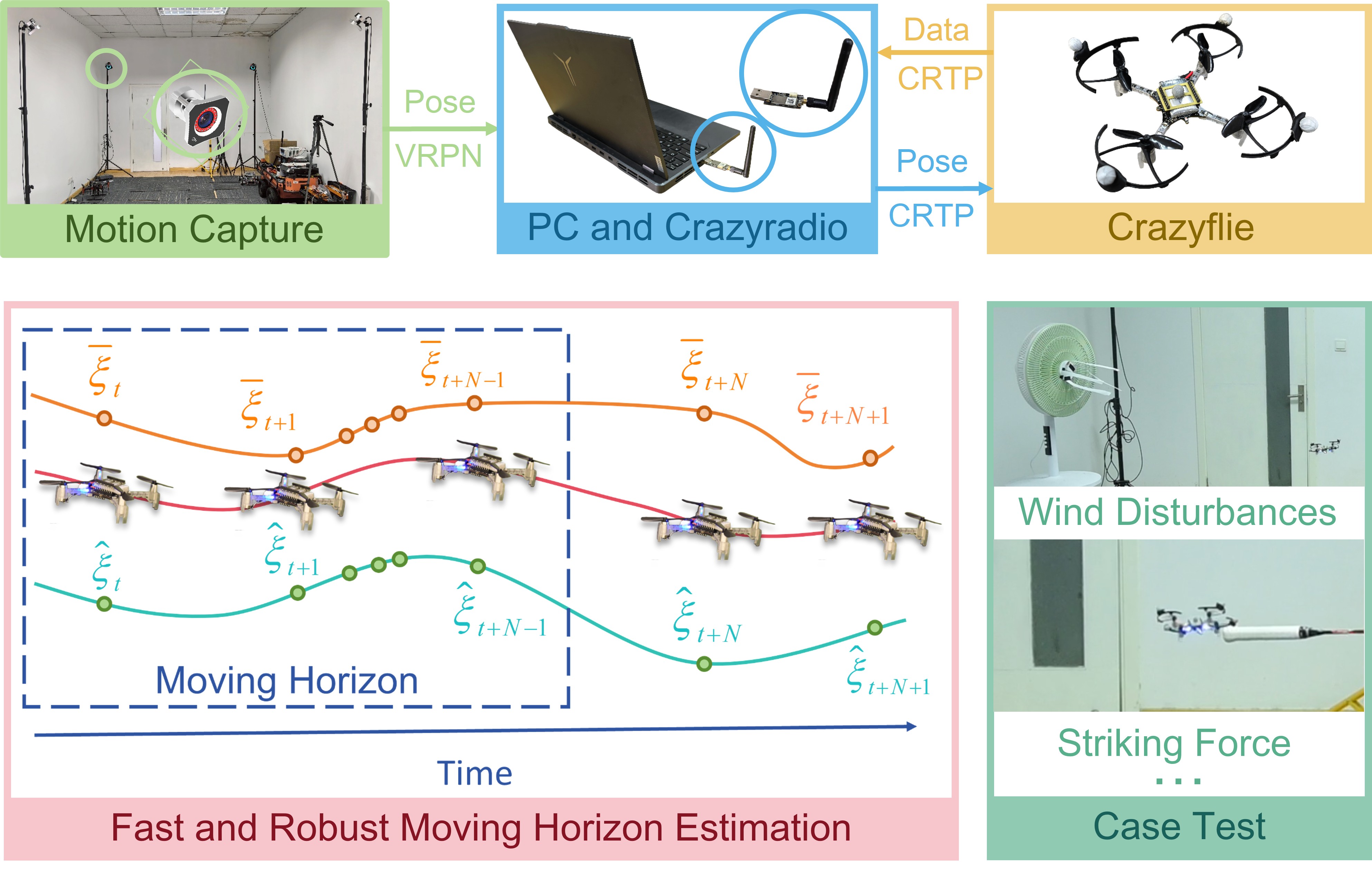
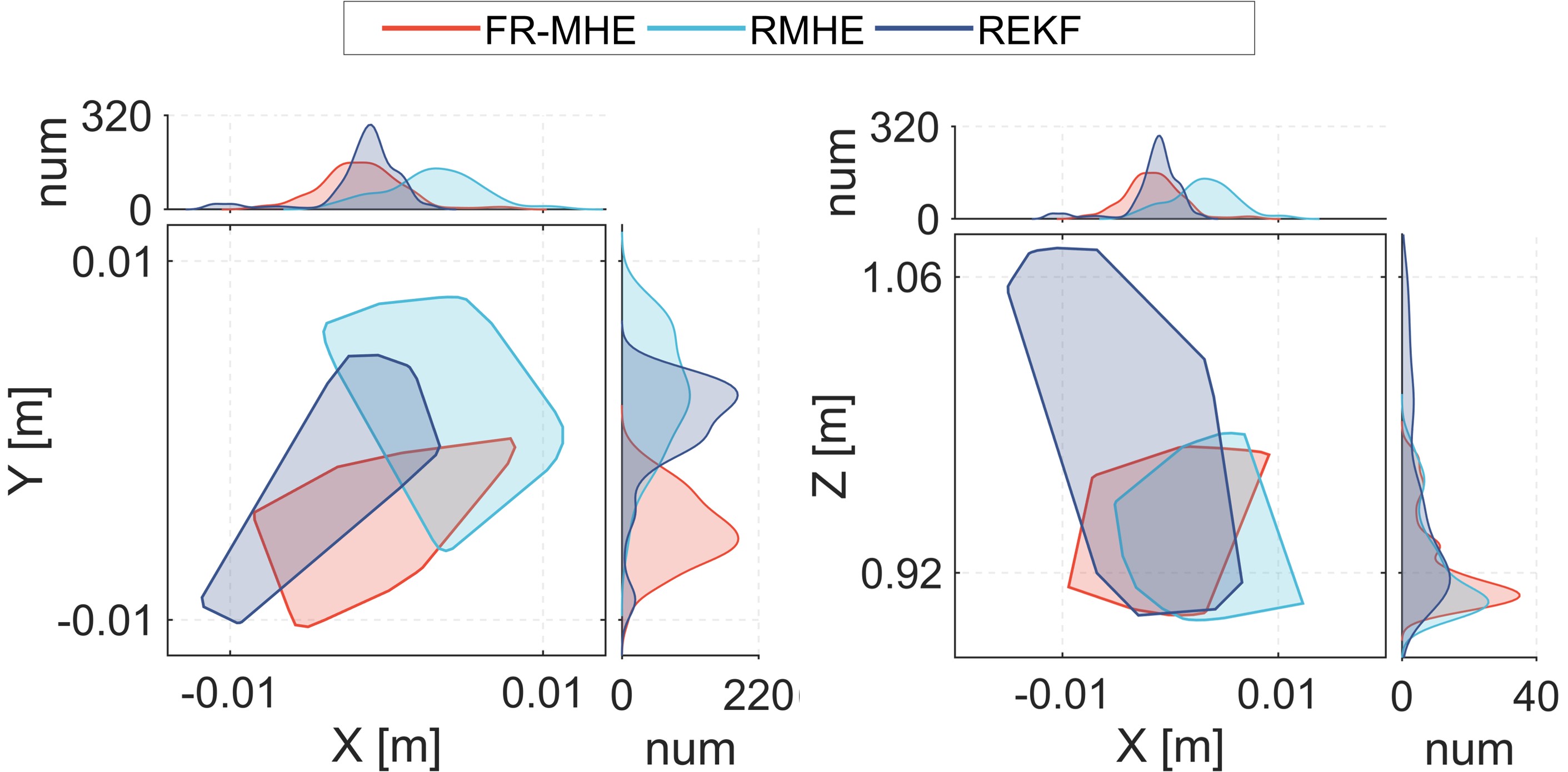
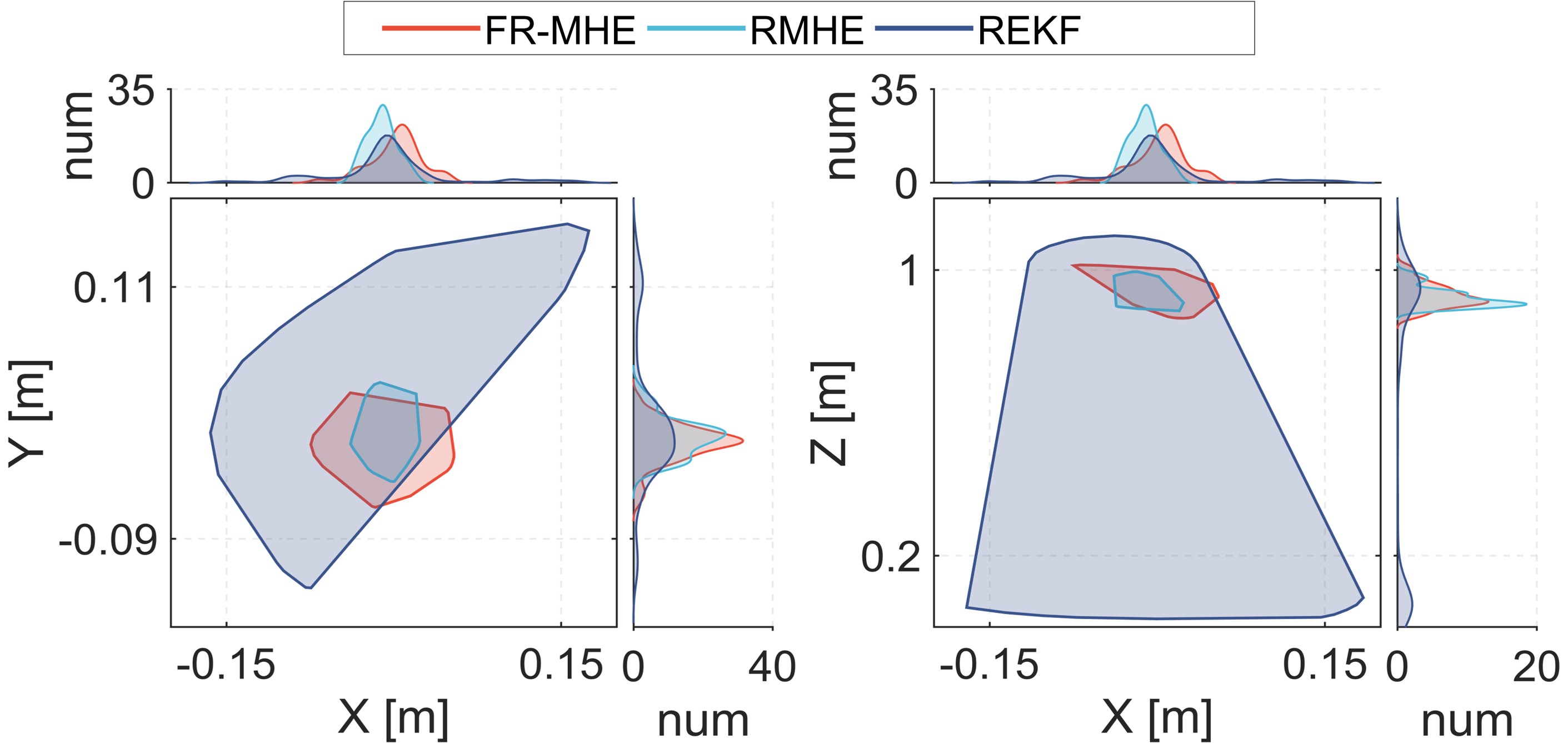
(3) Experimental validation: We conduct comprehensive closed-loop evaluations of FR-MHE against SOTA (R)MHE and (R)EKF on Crazyflie 2.1 platform under 10 representative scenarios. The experimental results demonstrate that FR-MHE offers clear advantages in both estimation efficiency and robustness.